Neural Networks: 6 Part(s)
Introduction
Convolutional Neural Network (CNN) is a class of deep Neural networks that mostly utilized for detecting objectts and patterns in images. It was first introduced by Yann LeCun1 in 1998.
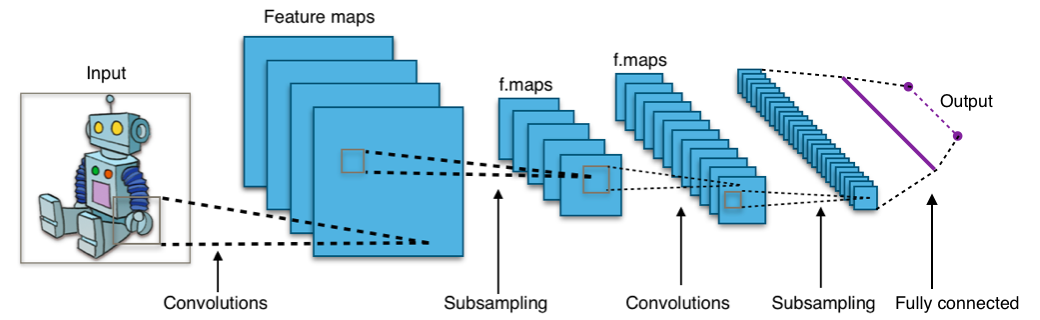 Layers in Convolutional Neural Network (Source: Wikipedia)
Layers in Convolutional Neural Network (Source: Wikipedia)
CNNs consist of:
- Convolutional layer is the core building block of CNN. This layer consists of filters, known as kernels or feature maps, which contain features of input images. Higher layers of the network contains more abstract and complex features, such as shapes an patterns. Deeper layers of the network contains simpler features, such as edges and corners.
- Pooling layer is used to simplify the spatial dimensions of the Convolutional layer.
- Fully connected layer is the layer that performs high-level reasoning and decision making.
- Output layer is the final layer which contains units that correspond to the number of classes in the dataset.
Implementation of CNN
In this implementation, we are going to use the Chest X-Ray Images2 from Kaggle to detect the presence of pneumonia in x-ray images.
Machine Specifications
- OS: Ubuntu 20.04 LTS
- CPU: AMD Ryzen 7 3700X
- GPU: NVIDIA GeForce RTX 4090 24GB
- RAM: 64GB DDR4
Keras
Before going deeper, please refer to the setting up Tensorflow environment post so we could create a separate environment and avoid any compatibility issues.
Let's define the CNN model using Sequential from Keras.
height, width = 224, 224
model = Sequential([
Conv2D(32, (3, 3), activation='relu', input_shape=(height, width, 3)),
MaxPooling2D((2, 2)),
Conv2D(64, (3, 3), activation='relu'),
MaxPooling2D((2, 2)),
Conv2D(128, (3, 3), activation='relu'),
MaxPooling2D((2, 2)),
Flatten(),
Dense(128, activation='relu'),
Dense(1, activation='sigmoid')
])
model.compile(
optimizer='adam',
loss='binary_crossentropy',
metrics=['accuracy']
)
model.summary()This is what we would get:
Model: "sequential"
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
conv2d (Conv2D) (None, 222, 222, 32) 896
_________________________________________________________________
max_pooling2d (MaxPooling2D) (None, 111, 111, 32) 0
_________________________________________________________________
conv2d_1 (Conv2D) (None, 109, 109, 64) 18496
_________________________________________________________________
max_pooling2d_1 (MaxPooling2)(None, 54, 54, 64) 0
_________________________________________________________________
conv2d_2 (Conv2D) (None, 52, 52, 128) 73856
_________________________________________________________________
max_pooling2d_2 (MaxPooling2)(None, 26, 26, 128) 0
_________________________________________________________________
flatten (Flatten) (None, 86528) 0
_________________________________________________________________
dense (Dense) (None, 128) 11075712
_________________________________________________________________
dense_1 (Dense) (None, 1) 129
=================================================================
Total params: 11,169,089
Trainable params: 11,169,089
Non-trainable params: 0
_________________________________________________________________The model consists of 3 Convolutional layers with 3 MaxPooling layers. Let's explain what each layer consists of.
Conv2D(32, (3, 3), activation='relu', input_shape=(height, width, 3)) consists
of filters, or feature maps, with a size of , stride of , and padding of .
Thus, the output shape would be .
MaxPooling2D((2, 2)) reduces the spatial dimensions of the Convolutional layer by .
Thus, the output shape would be .
Conv2D(64, (3, 3), activation='relu') consists of filters with a size of .
The output shape would be .
MaxPooling2D((2, 2)) reduces the spatial dimensions of the Convolutional layer by .
Thus, the output shape would be .
Conv2D(128, (3, 3), activation='relu) consists of filters with a size of .
The output shape would be .
MaxPooling2D((2, 2)) reduces the spatial dimensions of the Convolutional layer by .
Thus, the output shape would be .
Flatten() converts the 3D tensor into a 1D tensor.
The output shape would be units.
Once the features are extracted and flattened, we pass them to the Fully Connected layer. From here, the model performs high-level reasoning and decision making. Once done, the ouput is passed to the Output layer. Then, we would see if an image is classified as pneumonia or not.
Finally, train the model using the GPU and assign the training history to a variable.
with tf.device('/GPU:0'):
history = model.fit(train_generator, epochs=10, validation_data=validation_generator)Worry not. 10 times is enough for a simple model. Even with Nvidia RTX 4090, each epoch still takes 1 minute more or less.
...
Epoch 10/10
loss: 0.0945 - accuracy: 0.9632 - val_loss: 0.1310 - val_accuracy: 0.9375Evaluating the model using the test dataset.
test_loss, test_accuracy = model.evaluate(test_generator)
val_loss, val_accuracy = model.evaluate(validation_generator)The testing accuracy is 87%. While the validation accuracy is 75%.
However, these values may change every time you run the model.
PyTorch
Coming soon ...
Conclusion
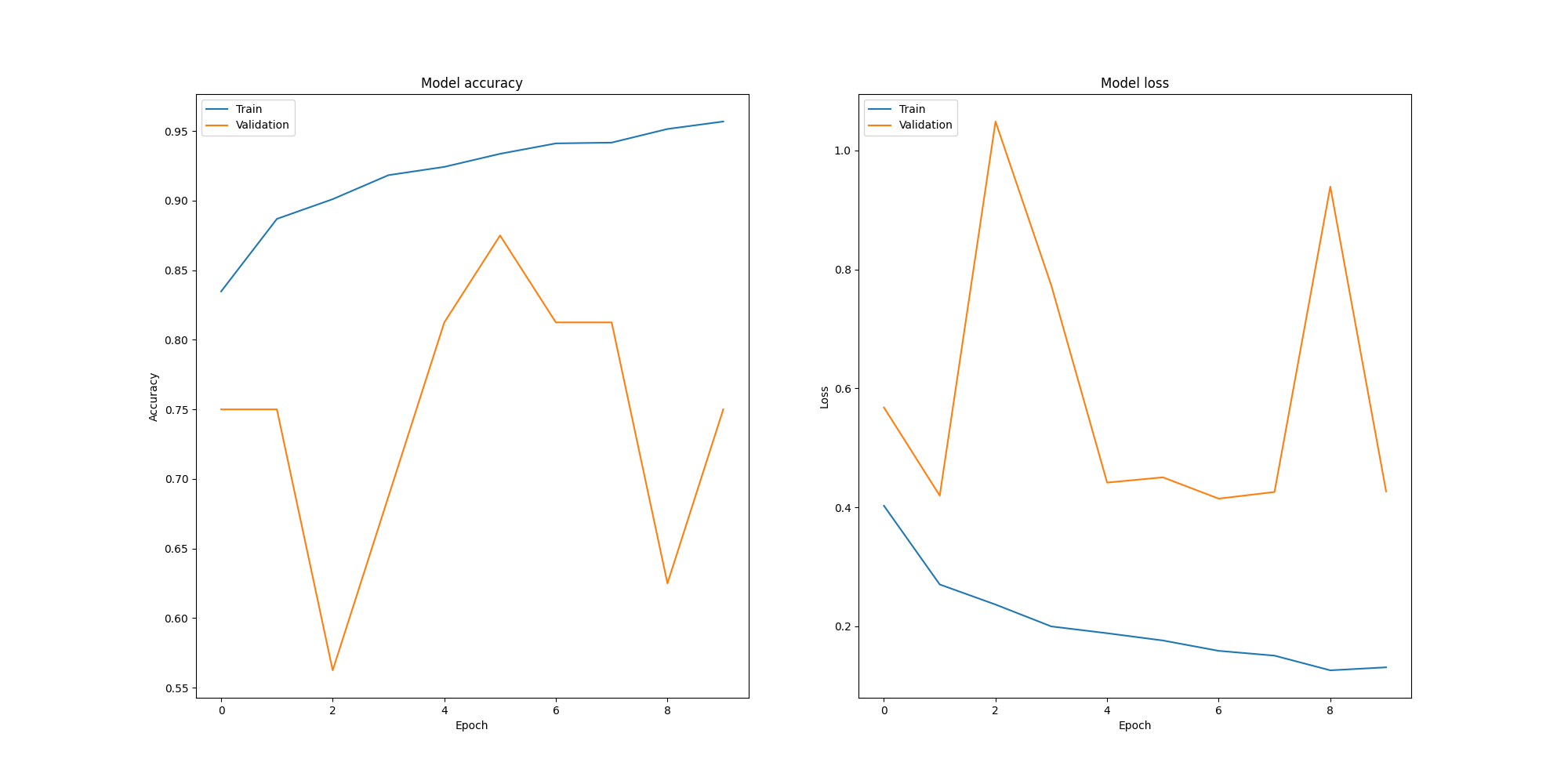 Accuracy and Loss of the model
Accuracy and Loss of the model
Although from the graph we can see that the validation accuracy is not ideal, this CNN model is relatively simple and good for a start. To improve the model, we could add more Convolutional layers, increase the number of filters, and add Dropout layers to prevent overfitting.
Code
Keras
1. Data Preparation
height, width = 224, 224
batch_size = 32
train_datagen = ImageDataGenerator(
rescale=1./255,
shear_range=0.2,
zoom_range=0.2,
horizontal_flip=True
)
test_dataset = ImageDataGenerator(rescale=1./255)
train_generator = train_datagen.flow_from_directory(
os.path.join(data_dir, 'train'),
target_size=(height, width),
batch_size=batch_size,
class_mode='binary'
)
test_generator = test_dataset.flow_from_directory(
os.path.join(data_dir, 'test'),
target_size=(height, width),
batch_size=batch_size,
class_mode='binary'
)
validation_generator = test_dataset.flow_from_directory(
os.path.join(data_dir, 'val'),
target_size=(height, width),
batch_size=batch_size,
class_mode='binary'
)2. Data Visualization
import matplotlib.pyplot as plt
fig, ax = plt.subplots(1, 2, figsize=(20, 10))
ax[0].imshow(train_generator[0][0][0])
ax[0].set_title('Normal X-Ray')
ax[1].imshow(test_generator[0][0][0])
ax[1].set_title('Pneumonia X-Ray')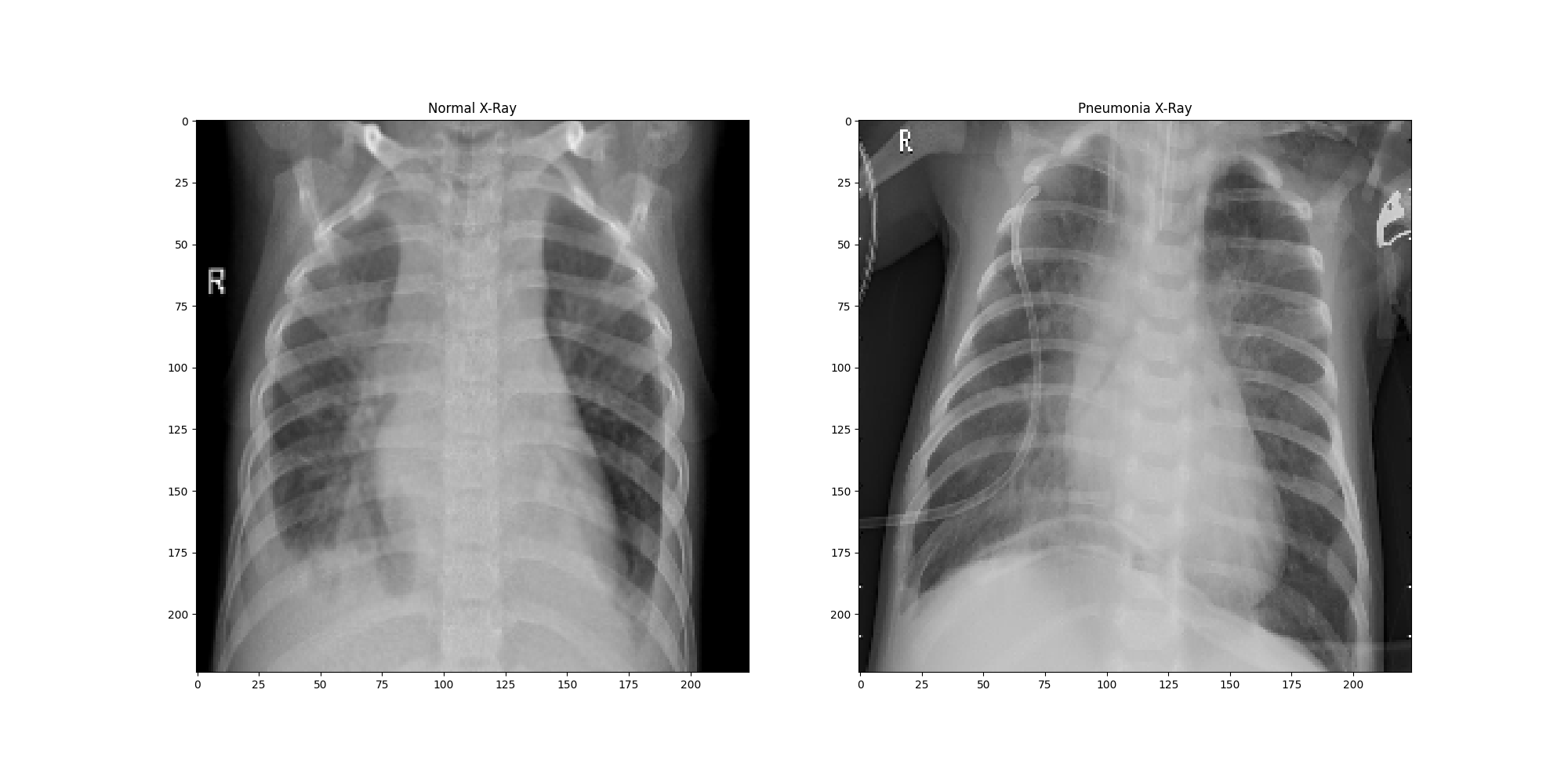 Normal and Pneumonia X-Ray images
Normal and Pneumonia X-Ray images
3. Model Definition
model = Sequential([
Conv2D(32, (3, 3), activation='relu', input_shape=(height, width, 3)),
MaxPooling2D((2, 2)),
Conv2D(64, (3, 3), activation='relu'),
MaxPooling2D((2, 2)),
Conv2D(128, (3, 3), activation='relu'),
MaxPooling2D((2, 2)),
Flatten(),
Dense(128, activation='relu'),
Dense(1, activation='sigmoid')
])
model.compile(
optimizer='adam',
loss='binary_crossentropy',
metrics=['accuracy']
)
model.summary()4. Model Training, Testing, and Evaluation
with tf.device('/GPU:0'):
history = model.fit(train_generator, epochs=10, validation_data=validation_generator)
test_loss, test_accuracy = model.evaluate(test_generator)
print(f'Test accuracy: {test_accuracy:.2f}%')
val_loss, val_accuracy = model.evaluate(validation_generator)
print(f'Validation accuracy: {val_accuracy:.2f}%')PyTorch
Coming soon ...
References
- Keiron O'Shea and Ryan Nash. An Introduction to Convolutional Neural Networks
- Zewen Li, Wenjie Yang, Shouheng Peng, Fan Liu. A Survey of Deep Convolutional Neural Network Architectures
Footnotes
-
Yann LeCun, Léon Bottou, Yoshua Bengio, and Patrick Haffner. Gradient-Based Learning Applied to Document Recognition ↩
-
Paul Mooney. Chest X-Ray Images (Pneumonia) Kaggle Dataset. ↩